
图形变换
Model Transforms
基础定义
- 图形在坐标系中的变换如果可以用一个矩阵表示,即
则说这个变换为线性变换。 - 满足线性变换定义的变换包括:缩放,切变,旋转。
- 平移不属于线性变换,为了兼容平移,需要引入齐次坐标。
- 由于表示点或向量使用的矩阵为竖式,所以所有的变换矩阵需要左乘,即
,为了免除坐标的多次运算,可以将左侧所有的变换矩阵使用结合律先运算,即 - 引入了齐次坐标后,需要对点与向量进行区分,点需要添加坐标1,向量需要添加坐标0。即
- 点的齐次坐标不为1时,即
,则该点表示的实际坐标为 - 如果需要进行线性变换后平移变换,需要先线性变换,再平移变换,交换顺序后得到的结果大概率不一致。
- 一个变换矩阵的逆矩阵可以将点或向量移回原处,即
,所以对于不在原点的图像或向量,可以先将其移回原点,线性变换后再移回原处,即设平移矩阵为 ,则可以
线性变换的矩阵
2D变换
缩放(Scale)
切变(Shear)
旋转(Rotate)
平移(Transform)
- 使用线性变换无法得出平移的矩阵
,只能使用矩阵加法计算得出。
为了使平移变换可以容纳进线性变换,需要添加齐次坐标。
3D变换
缩放(Scale)
- 类似2D下的缩放变换
切变(Shear)
- 暂无
旋转(Rotate)
- 根据不同的旋转轴,需要使用不同的旋转矩阵 三个旋转矩阵可以通过右手直角坐标系叉乘得到
- 对任意一个旋转可以分解成三个简单的绕轴旋转,即:
在这个公式中, , , 这三个角被称为欧拉角(Euler angles) - 罗德里格旋转公式(Rodrigues's Rotation Formula)
罗德里格旋转公式是计算三维空间中,一个向量绕旋转轴旋转给定角度以后得到的新向量的计算公式。这个公式使用原向量,旋转轴及它们叉积作为标架表示出旋转以后的向量。可以改写为矩阵形式,被广泛应用于空间解析几何和计算机图形学领域,成为刚体运动的基本计算公式。
平移(Transform)
- 类似2D下的平移变换
View/Camera Transformation
基础定义
- model transformation 模型变换
- view transformation 视角变换
- projection transformation 投影变换 以上三种简称MVP变换
定义一个相机
三元素
- 位置(Position)
- 视角方向 (look-at/gaze direction)
- 相机的上方向 (up direction)
定义一个相机
- 定义一个相机时,通常将相机放在原点上,向
方向看,以 轴为上方向 对于任意一个相机,满足以上条件需要进行以下几步操作 对于一个相机 - 将相机移动到原点
- 将视角
旋转到 方向 - 将上方向
旋转到 方向 - 将视角与上方向的叉乘
旋转到 方向 考虑如何得出 很困难,所以可以先考虑出如何从结果反推出矩阵,即
由此可得出:
Projection Transformation
基础定义
- 投影是3d向2d的渲染,主要分为正交投影(Orthographic projection)以及透视投影(Perspective projection)
- 正交投影一般用于工程视图,不会出现近大远小效应
- 透视投影一般是现实中的相机,会出现近大远小效应
正交投影
相机设置
方法一
- 将相机放在原点上,看向
方向,上方向为 - 去掉
轴,将所有的内容全部放在x与y组成的平面中 - 将结果缩放到一个
的矩形中 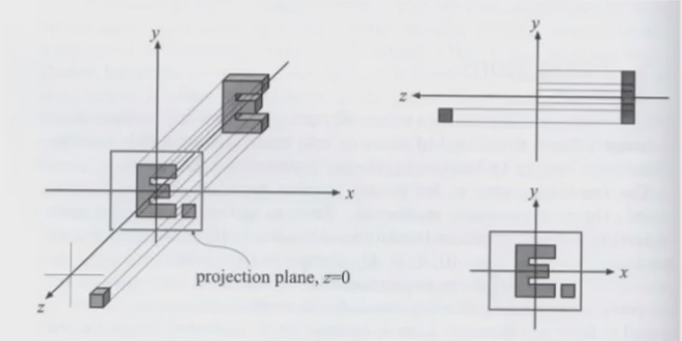
方法2
- 定义好模型的
- 将模型移动到原点上
- 将模型缩放到一个标准正方体(canonical cube)中
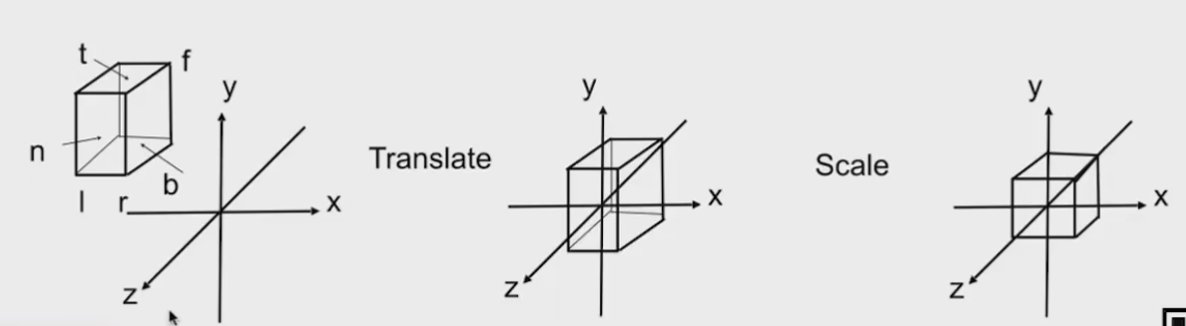
- 数学上的表示
透视投影
基础定义
- 透视投影需要从一个点,延申出一个四棱锥,这个四棱锥就是相机。
- 将远平面挤压成一个与近平面一样大小的四边形,然后做一次正交投影,即为透视投影,即需要得出
- 挤压远平面时需要规定几点:
- 近平面永远不会变化
- 远平面在挤压后,z值不会变化
- 远平面的中点在挤压后,仍为挤压后的中点
变化
- 相机与近平面组成的三角形 和 相机与远平面组成的三角形为相似三角形,所以近平面上的点
的 坐标为 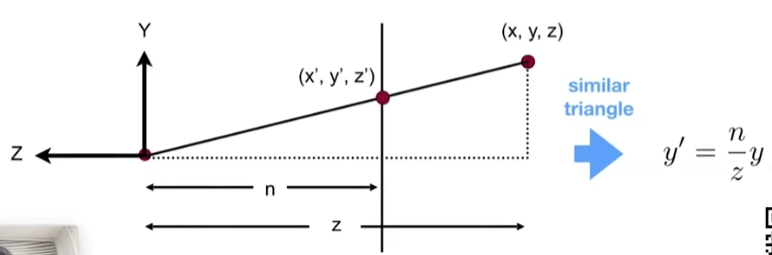
- 通过以上推论,则可以得出
以及 ,在齐次坐标中的表示则为:
- 则
可解得
- 此时仍不知道
如何运算,只知道近平面与远平面的 不会变化,其他 值对应的 可能变化 - 因为近平面任意点的z并不会变化,所以会有
设
则有